 View larger
View larger
Puma 560 dh table new arrivals
Puma 560 dh table new arrivals, Ch3 Part 3 new arrivals
$76.00
SAVE 50% OFF
$38.00
$0 today, followed by 3 monthly payments of $12.67, interest free. Read More
Puma 560 dh table new arrivals
Ch3 Part 3
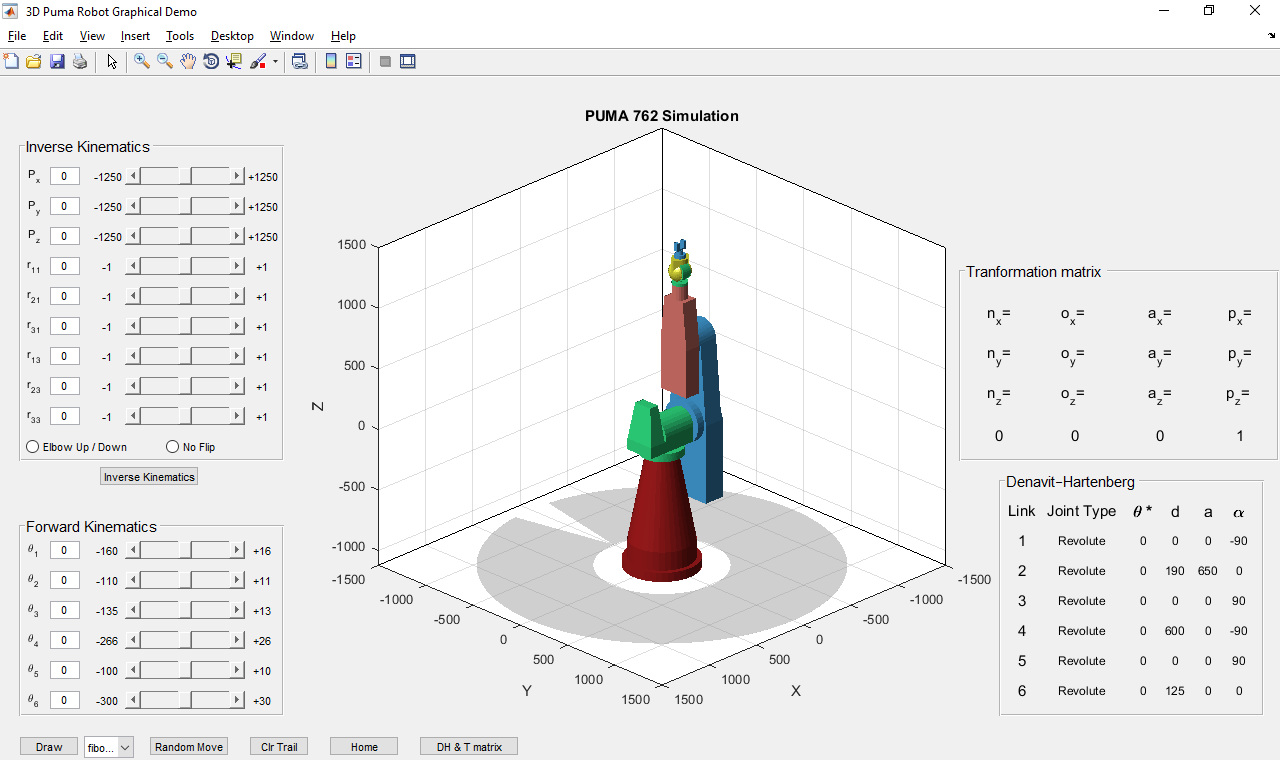
Puma Robot Simulation README.md at master PascPeli Puma Robot Simulation GitHub
ANIL HARISH Task Level Controller for 6 Axis Robots
Virtual Labs
Puma Robot Simulation README.md at master PascPeli Puma Robot Simulation GitHub
73KB 2001 null null null null null 12 9 2003 null pcsQ2sfsNJZHaM
Description
Product Name: Puma 560 dh table new arrivals
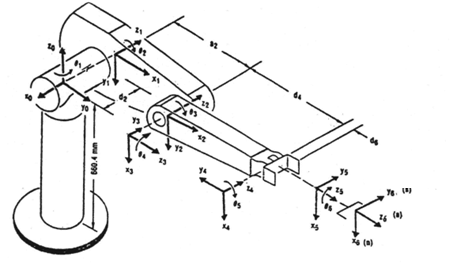
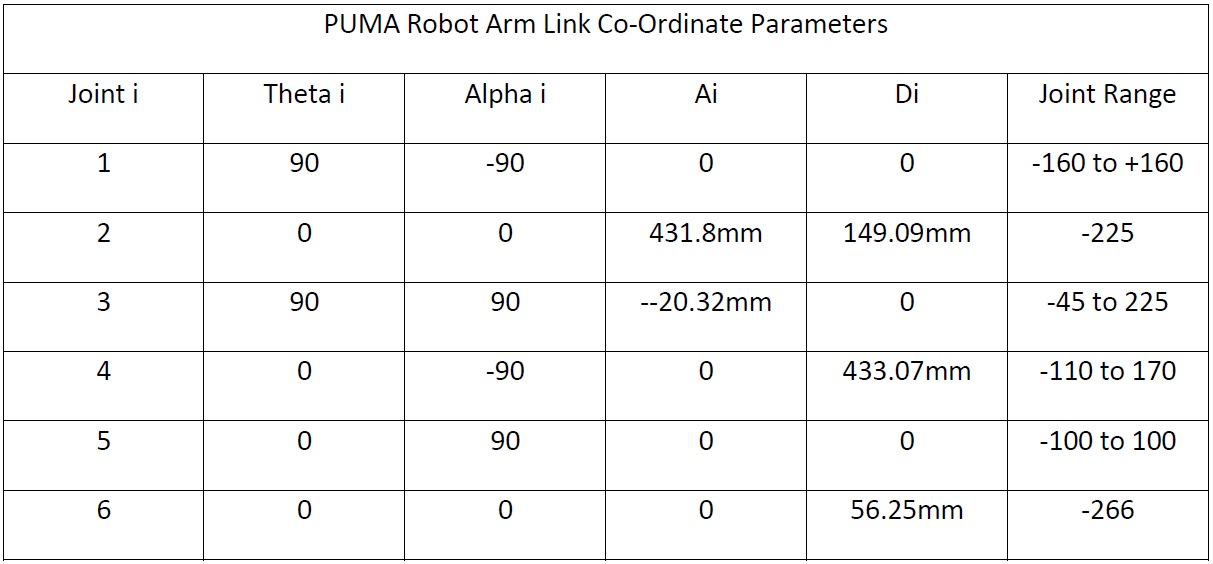
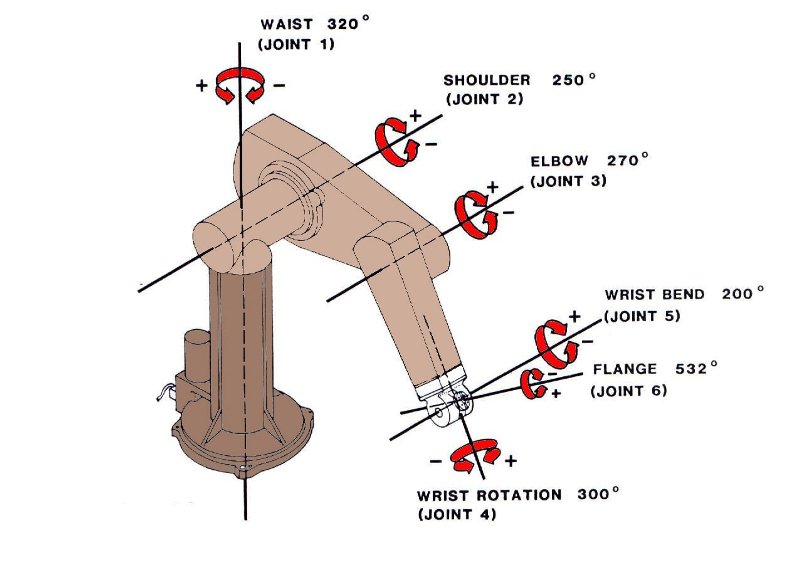
D H parameters of PUMA 560 robot. Download Table new arrivals, DH parameters of PUMA 560 Download Table new arrivals, D H Parameter of PUMA 560. Download Scientific Diagram new arrivals, Puma 560 store dh table new arrivals, Modified DH Parameter for Puma 560 Robotics Stack Exchange new arrivals, The DH parameters of the Puma560 robot. Download Scientific Diagram new arrivals, Solved For the following PUMA 560 robotic arm all joint Chegg new arrivals, Puma 560 clearance dh parameters new arrivals, PUMA 560 robot and its DH parameters Download Scientific Diagram new arrivals, Analytical Forward Kinematics Example for PUMA 260 Arm using DH Convention new arrivals, Solved 1. Consider a PUMA 560 robot manipulator. Find a Chegg new arrivals, Puma 560 clearance dh parameters new arrivals, The PUMA 560 at zero position by Craig s modified DH parameter 6 Download Scientific Diagram new arrivals, Table 1 from ROBOTIC CALIBRATION ISSUES ACCURACY REPEATABILITY AND CALIBRATION Semantic Scholar new arrivals, Ch3 Part 3 new arrivals, Puma Robot Simulation README.md at master PascPeli Puma Robot Simulation GitHub new arrivals, ANIL HARISH Task Level Controller for 6 Axis Robots new arrivals, Virtual Labs new arrivals, Puma Robot Simulation README.md at master PascPeli Puma Robot Simulation GitHub new arrivals, 73KB 2001 null null null null null 12 9 2003 null pcsQ2sfsNJZHaM new arrivals, Berta DH Solution Puma 260 manipulator new arrivals, Virtual Labs new arrivals, PPT ROBOT KINEMATICS PowerPoint Presentation free download ID 1868980 new arrivals, Puma 560 simulation using pumakins Page 2 LinuxCNC new arrivals, Solved Consider the PUMA 560 manipulator shown here Figure Chegg new arrivals, 44KB 2001 null null null null null null null 1 2003 null pcsQ2sfsNJZHaM new arrivals, ARMA new arrivals, Standard DH parameters of PUMA560. Download Scientific Diagram new arrivals, 2.11 Robotics ESE Mains D H parameters of PUMA Programmable Universal Manipulation 560 robot new arrivals, Appendix 1 Inverse Kinematics The D H parameters of Chegg new arrivals, 18KB 2001 null null null 3 3 3 3 1 2003 null pcsQ2sfsNJZHaM new arrivals, A Novel High Speed Third Order Sliding Mode Observer for Fault Tolerant Control Problem of Robot Manipulators new arrivals, Virtual Labs new arrivals, Puma Robot Simulation README.md at master PascPeli Puma Robot Simulation GitHub new arrivals, Numerical calculation of the base inertial parameters of robots Semantic Scholar new arrivals.
D H parameters of PUMA 560 robot. Download Table new arrivals, DH parameters of PUMA 560 Download Table new arrivals, D H Parameter of PUMA 560. Download Scientific Diagram new arrivals, Puma 560 store dh table new arrivals, Modified DH Parameter for Puma 560 Robotics Stack Exchange new arrivals, The DH parameters of the Puma560 robot. Download Scientific Diagram new arrivals, Solved For the following PUMA 560 robotic arm all joint Chegg new arrivals, Puma 560 clearance dh parameters new arrivals, PUMA 560 robot and its DH parameters Download Scientific Diagram new arrivals, Analytical Forward Kinematics Example for PUMA 260 Arm using DH Convention new arrivals, Solved 1. Consider a PUMA 560 robot manipulator. Find a Chegg new arrivals, Puma 560 clearance dh parameters new arrivals, The PUMA 560 at zero position by Craig s modified DH parameter 6 Download Scientific Diagram new arrivals, Table 1 from ROBOTIC CALIBRATION ISSUES ACCURACY REPEATABILITY AND CALIBRATION Semantic Scholar new arrivals, Ch3 Part 3 new arrivals, Puma Robot Simulation README.md at master PascPeli Puma Robot Simulation GitHub new arrivals, ANIL HARISH Task Level Controller for 6 Axis Robots new arrivals, Virtual Labs new arrivals, Puma Robot Simulation README.md at master PascPeli Puma Robot Simulation GitHub new arrivals, 73KB 2001 null null null null null 12 9 2003 null pcsQ2sfsNJZHaM new arrivals, Berta DH Solution Puma 260 manipulator new arrivals, Virtual Labs new arrivals, PPT ROBOT KINEMATICS PowerPoint Presentation free download ID 1868980 new arrivals, Puma 560 simulation using pumakins Page 2 LinuxCNC new arrivals, Solved Consider the PUMA 560 manipulator shown here Figure Chegg new arrivals, 44KB 2001 null null null null null null null 1 2003 null pcsQ2sfsNJZHaM new arrivals, ARMA new arrivals, Standard DH parameters of PUMA560. Download Scientific Diagram new arrivals, 2.11 Robotics ESE Mains D H parameters of PUMA Programmable Universal Manipulation 560 robot new arrivals, Appendix 1 Inverse Kinematics The D H parameters of Chegg new arrivals, 18KB 2001 null null null 3 3 3 3 1 2003 null pcsQ2sfsNJZHaM new arrivals, A Novel High Speed Third Order Sliding Mode Observer for Fault Tolerant Control Problem of Robot Manipulators new arrivals, Virtual Labs new arrivals, Puma Robot Simulation README.md at master PascPeli Puma Robot Simulation GitHub new arrivals, Numerical calculation of the base inertial parameters of robots Semantic Scholar new arrivals.